编码器速度和方向检测,371电机方向与速度检测,stm32编码器接口模式
文章来自网络:http://yfrobot.com/thread-2411-1-1.html
编码器是什么玩意呢,它可是一个好玩的东西,做小车测速必不可少的玩意,下面,我将从编码器的原理讲起,一直到用stm32的编码器接口模式,测出电机转速与方向。
1.编码器
图1 编码器示意图
图1为编码器的示意图,中间是一个带光栅的码盘,光通过光栅,接收管接收到高电平,没通过,接收到低电平。电机旋转一圈,码盘上有多少光栅,接受管就会接收多少个高电平。371电机中的码盘就是这样的,他是334线码盘,具有较高的测速精度,也就是电机转一圈输出334个脉冲,芯片上已集成了脉冲整形触发电路,输出的是矩形波,直接接单片机IO就OK。
增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。下图为编码器的原理图:

图2 增量式旋转编码器
A,B两点对应两个光敏接受管,A,B两点间距为 S2 ,码盘的光栅间距分别为S0和S1。S0+S1的距离是S2的四倍。这样保证了A,B波形相位相差90度。旋转的反向不同,锯齿波A,B先到达高电平的顺序就会不同,如上图左侧所示,顺序的不同,就可以得到旋转的方向。
2.stm32编码器接口模式(寄存器)
stm32的编码器接口模式在STM32中文参考手册中有详细的说明,在手册273页,14.3.12节。程序是完全按照 下图方式,设置寄存器的。
请到本文尾下载STM32中文参考手册
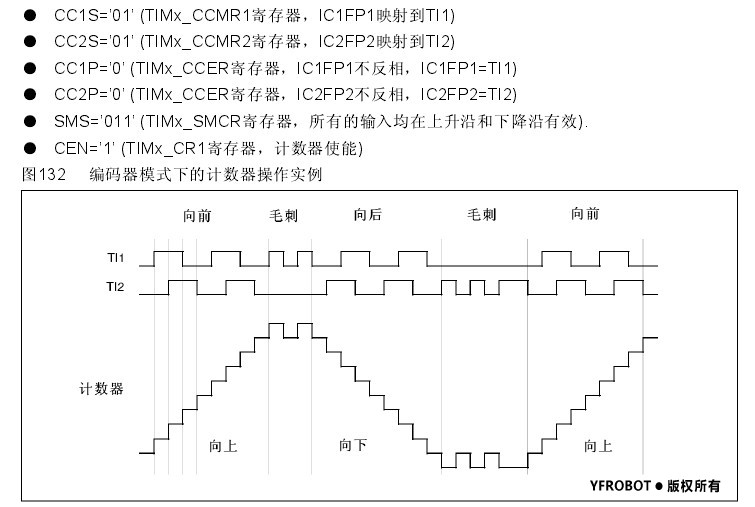
图3
从图3中可以看出,TI1波形先于TI2波形90°时,每遇到一个边沿变化是,计数器加1(可以通过寄存器设置加减),可以看出一个光栅,被计数了4次。TI1波形后于TI2波形90°时 ,每遇到一次边沿变化,计数器减1。
//TIM2_Encoder_Init,Tim2_CH1(PA0);Tim2_CH2(PA1)
//arr:自动重装值 0XFFFF
//psc:时钟预分频数 ,不分频
void TIM2_Encoder_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<0; //TIM2时钟使能
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRL&=0XFFFFFF00; //PA0、PA1 清除之前设置
GPIOA->CRL|=0X00000044; //PA0、PA1 浮空输入
TIM2->ARR=arr; //设定计数器自动重装值
TIM2->PSC=psc; //预分频器
TIM2->CCMR1 |= 1<<0; //输入模式,IC1FP1映射到TI1上
TIM2->CCMR1 |= 1<<8; //输入模式,IC2FP2映射到TI2上
TIM2->CCER |= 0<<1; //IC1不反向
TIM2->CCER |= 0<<5; //IC2不反向
TIM2->SMCR |= 3<<0; //所用输入均在上升沿或下降沿有效
TIM2->CR1 |= 1<<0; //使能计数器
}3 硬件
用到的模块有STM32核心板、L298电机驱动、371带编码器电机(1:34)。这里主要介绍一下电机,1:34指的是电机轴转动34圈,电机输出1圈。1:X,X值越小,电机的输出转速也就越快,扭矩也就越小;反之,X值越大,电机的输出转速越慢,扭矩也越大。
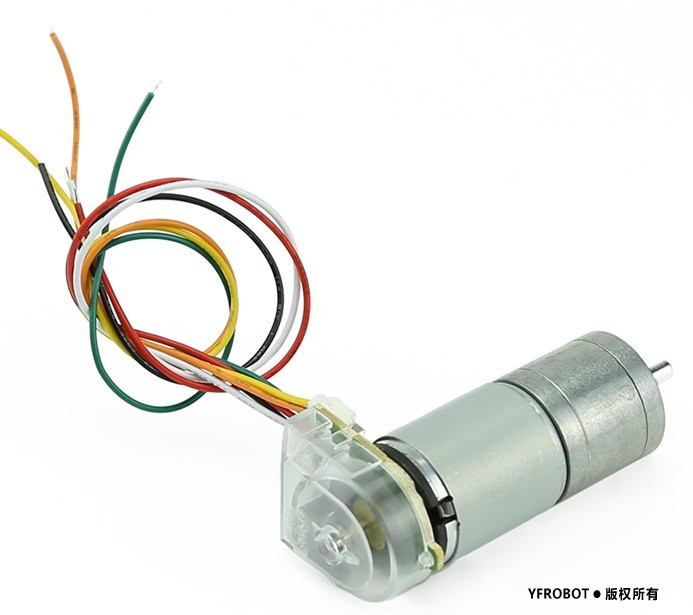
图4 电机实物图
左边两根黄线是电机两极。绿线和白线是脉冲输出线,分别接编码器的接收管A、B,用一根可以测得速度,两根同时用可测出电机速度与转向。红线和黑线是编码器电源接线,红正黑负,电压3.3V-5V,不不可接反。
4 控制代码
工作指示灯、电机方向与速度控制代码。
//LED IO 初始化 端口PD.2 运行指示灯
void LED_Init(void)
{
RCC->APB2ENR|=1<<5; //使能PORTD时钟
GPIOD->CRL&=0XFFFFF0FF;
GPIOD->CRL|=0X00000300; //PD.2推挽输出
GPIOD->ODR|=1<<2; //PD.2输出高
}
//电机旋转方向控制信号端口初始化
//PC1~0推挽输出,输出高
void M_Init(void)
{
RCC->APB2ENR|=1<<4; //使能PORTC时钟
GPIOC->CRL&=0XFFFFFF00;
GPIOC->CRL|=0X00000033; //PC1~0推挽输出
GPIOC->ODR|=0XF<<0; //PC1~0输出高电平
}
//定时器TIM3,PWM输出初始化,CH1(PA6)
//arr:自动重装值
//psc:时钟预分频数
//设置自动重装值为900,那么PWM频率=72000/900=8Khz
////见STM32参考手册,14.3.9PWM模式。
void TIM3_PWM_Init(u16 arr,u16 psc) //arr设定计数器自动重装值
//psc预分频器不分频,psc=0
{
RCC->APB1ENR|=1<<1; //TIM3时钟使能
GPIOA->CRL&=0XF0FFFFFF;//PA6输出
GPIOA->CRL|=0X0B000000;//复用功能输出
GPIOA->ODR|=1<<6;//PA6上拉
TIM3->ARR=arr;//设定计数器自动重装值
TIM3->PSC=psc;//预分频器不分频
TIM3->CCMR1|=6<<4; //CH1 PWM1模式 高电平有效
TIM3->CCMR1|=1<<3; //CH1预装载使能
TIM3->CCER|=1<<0; //OC1 输出使能
TIM3->CR1=0x0080; //ARPE使能
TIM3->CR1|=0x01; //使能定时器3
}
//电机方向与速度控制,速度调节范围为-100~+100
//大于0时,正转,小于0时,反转
// 占空比低于0.4时电机不转
//(占空比是指高电平在一个周期之内所占的时间比率)
//TIM3->CCR1的设定范围为0~900(因为arr=900)
//见STM32参考手册,14.3.9PWM模式。
void Motor_Speed_Control(s16 motorSpeed)
{
s16 speed = 0 ;
if(motorSpeed>100) speed = 100;
else if (motorSpeed<-100) speed = -100;
else speed = motorSpeed;
if(speed == 0)
{
M_1 = 0;
M_2 = 0;
}
else if(speed > 0)
{
M_1 = 0;
M_2 = 1;
TIM3->CCR1 = speed * 9;
}
else
{
M_1 = 1;
M_2 = 0;
TIM3->CCR1 = -speed * 9;
}
}电机速度与方向检测代码
//TIM2_Encoder_Init,Tim2_CH1(PA0);Tim2_CH2(PA1)
//arr:自动重装值 0XFFFF
//psc:时钟预分频数 ,不分频
//见STM32中文手册 14.3.12编码器接口模式
void TIM2_Encoder_Init(u16 arr,u16 psc)
{
RCC->APB1ENR|=1<<0; //TIM2时钟使能
RCC->APB2ENR|=1<<2; //使能PORTA时钟
GPIOA->CRL&=0XFFFFFF00; //PA0、PA1 清除之前设置
GPIOA->CRL|=0X00000044; //PA0、PA1 浮空输入
TIM2->ARR=arr; //设定计数器自动重装值
TIM2->PSC=psc; //预分频器
TIM2->CCMR1 |= 1<<0; //输入模式,IC1FP1映射到TI1上
TIM2->CCMR1 |= 1<<8; //输入模式,IC2FP2映射到TI2上
TIM2->CCER |= 0<<1; //IC1不反向
TIM2->CCER |= 0<<5; //IC2不反向
TIM2->SMCR |= 3<<0; //所用输入均在上升沿或下降沿有效
TIM2->CR1 |= 1<<0; //使能计数器
}
//计数寄存器赋值
void TIM2_Encoder_Write(int data)
{
TIM2->CNT = data;
}
//读计数个数
int TIM2_Encoder_Read(void)
{
TIM2_Encoder_Write(0); //计数器清0
delay_ms(10); //检测时间,可调节
return (int)((s16)(TIM2->CNT)); //数据类型转换
//记录边沿变化次数(一个栅格被记录4次)
}这里我们只显示边沿变化次数,没有具体的算出速度。
主函数
int main(void)
{
// motorSpeed的范围为-100 ~ +100;
s16 motorSpeed = 100;
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72); //延时初始化
uart_init(72,9600); //串口1初始化
LED_Init(); //初始化与LED连接的硬件接口
M_Init(); ////初始化电机运行方向控制端口
TIM3_PWM_Init(900,0); //不分频。PWM频率=72000/900=8Khz
TIM2_Encoder_Init(0xffff, 0); //计数器自动重装值为最大
while(1)
{
LED =! LED;
Motor_Speed_Control(motorSpeed);
printf("编码器值:%d\n ",TIM2_Encoder_Read());
}
}5 估算验证
这里我们只是大概的估算验证测量值是否正确,不具有完全正确性。
我们设置motorSpeed = 100 ,得到测量值如下图:
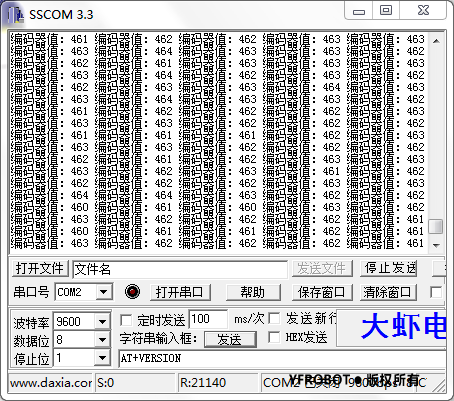
图5 motorSpeed = 100
因为误差是不可避免的,所以看到每次检测的值都是不一样的。我们取462,因为一个光栅被记录了4次,所以在10ms内一共检测到了462/4=115.5,那么得到11.55个/ms,每ms内检测到11.55个光栅。
通过码表,记录电机输出50圈,用时50.2s,那么这时应该检测到的光栅个数为50*34(电机转34圈,输出1圈)*334(每圈有334个光栅)=567800,除以时间,得到估算值11.31个/ms。可以看出估算值与测量值是相近的,认为测量是准确的。
设置motorSpeed = -50 ,得到测量值如下图 :

图6 motorSpeed=-50
可以看到测量值是负值,说明电机是反转,与实际设置相符。

- 最新评论
- 总共0条评论
